Projects/Media
AB Riverbend Vote Map
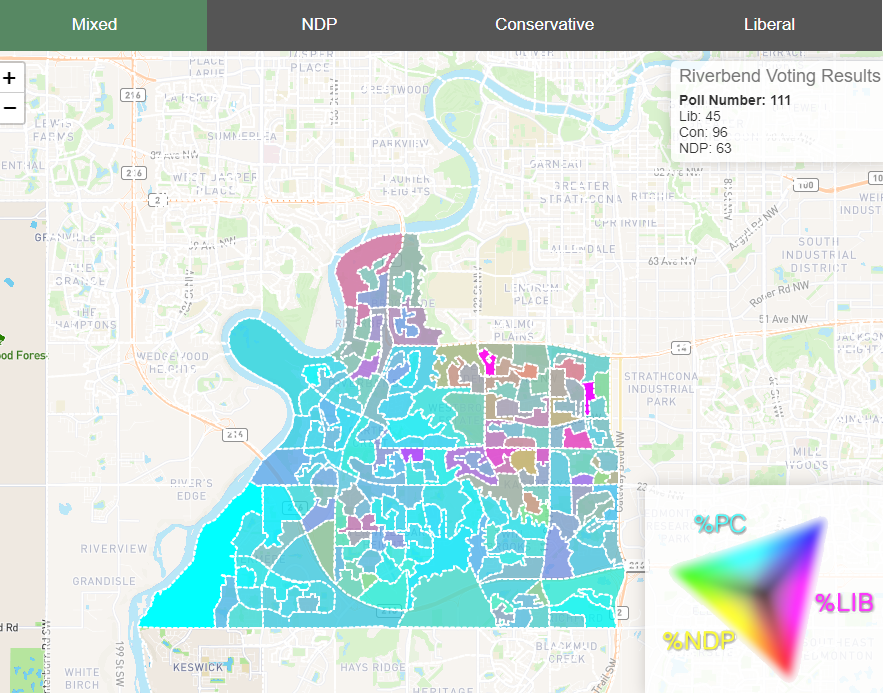
One of my friends ran to be an MP a couple of years ago, and we were curious which areas of the riding we should focus on. I pulled historic voting data and created an interactive map to show were support was growing and most concentrated.
While they didn't win, my buddy ended up doing better than a previous candidate for their party in that riding, which is pretty neat.
You can check out the interactive version here. (not optimized for mobile screens, like at all)
Axis Reloaded
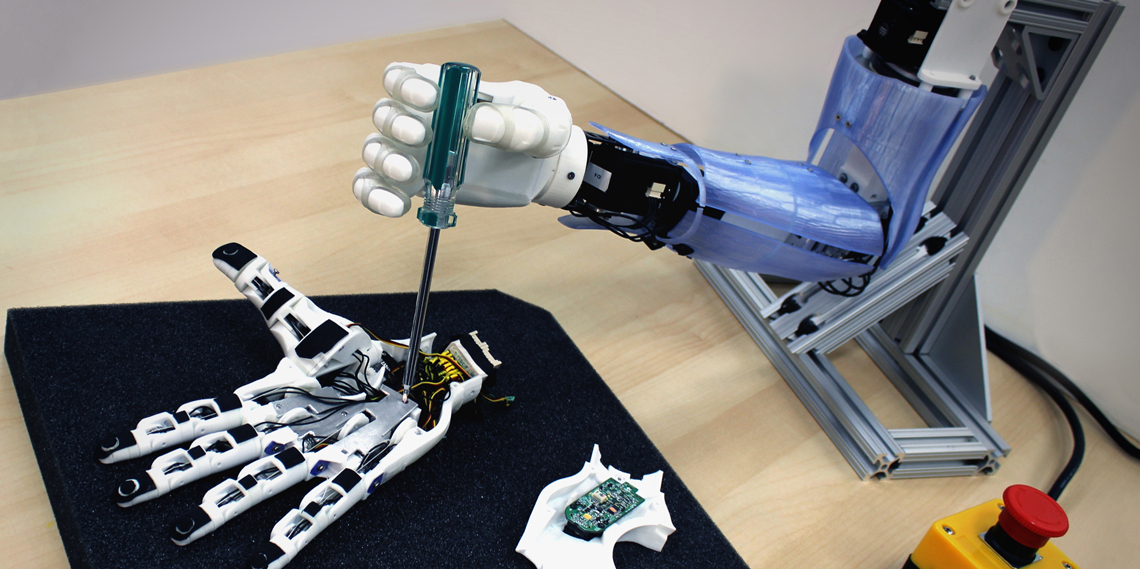
Worked with Eric Wells and Mark Sherstan to design, construct, and program a robotic kinetic sculpture as a hardware demo for the University of Alberta Faculty of Engineering.
The "claw" uses a machine vision (webcam in the palm) to track deviations in the rotating plate, to trigger a re-center. The whole device is self-contained and autonomous, using a Raspberry Pi for trajectory calculation and device control. This project was additionally demoed at the January 2020 edition of Telus World of Science's Dark Matters.
ISARC Constructing Futures Hackathon
Competed and won first place in the 2019 ISARC Constructing Futures 24 Hour Hackathon. I added a cloud-based image classifier layer to a VR robotic control platform that I had previously created.

Interview with New Trail Magazine
Spoke with New Trial Magazine about the Bento Arm, the BLINC Lab's open-source prosthetic training and testing platform. Who would win in a fight, the Bento Arm vs an Octopus Tentacle?
SMACKDOWN - New Trail Magazine Winter 2019 (p. 19)
HumanMachine
Created and operated the Nao Robot control interface used for an AI-powered improv show in the 2018 Edmonton Fringe festival. Performed alongside Kory Mathewson + Piotr Mirowski.
Artificial intelligence put to the test during Edmonton Fringe Festival show - Global News

Frick I Love Nature
Was a production assistant and b-roll cameraman for select segments of a couple of episodes of Frick I Love Nature. This was completely unrelated to any tech stuff, but was an absolute blast.
Amazing Animals in the Rocky Mountains - Mountain Goats, Lichen and Pikas - Frick I Love Nature
